

- Разработка панели приборов на основе raspberry pi и 7″ дисплея
- Почему не работает переходник obd2 gm12 pin для ваз, daewoo
- Can сниффер из arduino uno
- Видео работы цифровой панели приборов на базе raspberry pi
- Переходник obd2 12pin газ на алиэкспресс — купить онлайн по выгодной цене
- Переходник obd2 газель купить в москве в интернет магазине
- Переходник газ 12 pin obd2 в москве: 500-товаров: бесплатная доставка, скидка-57% [перейти]
- Переходник для газ 12-pin на obd2 16pin
- Подслушиваем запросы с помощью диагностической системы vag-com (vcds)
- Приложение на телефон виртуальная панель приборов
- Софт панели приборов на python и kivy (ui framework)
- Переходник vag 2×2: купить по выгодной цене от 750 рублей в москве, россии и снг. характеристики, фото, отзывы – carmod
Разработка панели приборов на основе raspberry pi и 7″ дисплея
В качестве аппаратной части я выбрал Raspberry Pi. Была идея использовать Android планшет, но показалось, что на Raspberry Pi будет проще и быстрее. В итоге докупил официальный 7″ дисплей, и сделал CAN шилд из модуля TJA1050 Niren.
OBD2 штекер использовал от старого ELM327 адаптера.
Используются контакты: CAN_L, CAN_H, 12, GND.
Тесты в машине прошли успешно и теперь нужно было все собрать. Плату дисплея, Raspberry Pi и блок питания разместил на куске черного пластика, очень удачно подобрал пластмассовые втулки, с ними ничего не болтается и надежно закреплено.
Местом установки выбрал бардачок на торпедо, которым я не пользуюсь. По примеркам в него как раз помещается весь бутерброд.
Напильником довел лист черного пластика до размера крышки бардачка, к нему прикрепил бутерброд и дисплей. Для прототипа сойдет, а 3D модель с крышкой для дисплея и всеми нужными крепежами уже в разработке.
Почему не работает переходник obd2 gm12 pin для ваз, daewoo
Заказав кабель для диагностики OBD2 — GM 12pin и подключив его к автомобилю семейства ВАЗ многие сталкиваются с различными неприятностями.
Самой лучшей, если можно так выразиться из которых становится просто невозможность диагностики автомобиля, но бывают и случаи включения бензонасоса либо короткое замыкание в электропроводке и если повезет, то дело обойдется банальной заменой предохранителей.
После подобных экспериментов обыватель берет кабель в руки и размахивая им и на чем свет стоит ругает продавца и производителя.
Вышеуказанные неприятности являются следствием как правило не правильной распиновки кабеля, то есть по тому проводу, по которому должна считываться информация на прибор поступает питание, ну или по тому проводу, по которому поступает питание подается напряжение на бензонасос. А последнему что прикажешь делать? Правильно! Включаться и работать.
Но как бы сейчас не оказалось все странно и непонятно, а может и звучать будет абсурдно, но кабель на самом деле оказывается исправным и рабочим. Да, да, рабочим, и даже распиновка у него правильная. Правильная, но не подходящая под нашу марку автомобиля.
Как так? Спросите Вы? А ответ тут прост. Шнур всего на всего предназначен для другой марки автомобиля, а именуется эта марка ни как иначе как DAEWOO.
Вот в принципе и все. Имея одинаковые разъемы для диагностики на автомобилях ВАЗ и DAEWOO
Мы имеем разную распиновку, а это значит, что если шнур подошел в колодку, это еще не означает, что подключив его он будет работать и не нанесет пагубных последствий для электроники вашего автомобиля.
И так, давайте разберемся, какой кабель необходим и какая распиновка должна быть у него для диагностики автомобиля ВАЗ.
Для диагностики Автоваза до 2005 года выпуска необходимо подключить три провода в диагностическую колодку:
Масса
К-lile

Can сниффер из arduino uno
Чтобы послушать, что отправляет VCDS в CAN шину я собрал сниффер на макетке из Arduino и модуля MCP2515 TJA1050 Niren.
Схема подключения следующая:
Видео работы цифровой панели приборов на базе raspberry pi
ОБНОВЛЕНО 24.06.2021
Переходник obd2 12pin газ на алиэкспресс — купить онлайн по выгодной цене
Перед покупкой сравните цены на переходник obd2 12pin газ, прочитайте реальные отзывы покупателей, ознакомьтесь с техническими характеристиками.
Закажите переходник obd2 12pin газ онлайн с доставкой по России: товары с пометкой Plus доступны с ускоренной доставкой и улучшенными условиями возврата.
На Алиэкспресс переходник obd2 12pin газ всегда в наличии в большом ассортименте: на площадке представлены как надежные мировые бренды, так и перспективные молодые.
Переходник obd2 газель купить в москве в интернет магазине
Переходник GM 12 pin предназначен для автомобилей компании General Motors, например, Chevrolet Lanos, Daewoo Sens, Chevrolet Aveo, автомобилей ВАЗ до 2004 года выпуска, Таврия и других, оснащенных электронными блоками Микас и Bosch
Самовывоз, Почта РФ, Курьером, Логистическая компания
Переходник газ 12 pin obd2 в москве: 500-товаров: бесплатная доставка, скидка-57% [перейти]
Популярные товары в наличии! В категории: Переходник газ 12 pin obd2 – купить по выгодной цене, доставка: Москва, скидки!
Переходник для газ 12-pin на obd2 16pin
Данный переходник пригодится владельцам автомобилей марки ГАЗ на машинах которых установлена диагностическая колодка старого образца имеющая 12 контактов. Если Вы планируете использовать на своем автомобиле оборудование для диагностики имеющий разъем стандарта OBD 2 на 16 контактов, то Вам необходимо купить именно этот переходник для Вашего авто. Приобретая переходник для 12-пин на OBD-II Вы забудете о проблеме отсутствия диагностического разъема стандарта OBD 2.
Переходник полностью доработан под распиновку ГАЗ колодки. Вам не нужно ничего дорабатывать в нем, в отличие от переходников для автомобилей Renault которые внешне схожи, но имеют другую распиновку контактов.
Комплект поставки:
Переходник Газ 12 pin – OBD2 – 1 шт.
Подслушиваем запросы с помощью диагностической системы vag-com (vcds)
Описание VCDS с официального сайта
Приложение на телефон виртуальная панель приборов


Если есть желание поддержать проект, то вот ссылка на приложение, принимаю любые замечания и предложения!
VAG Virtual Cockpit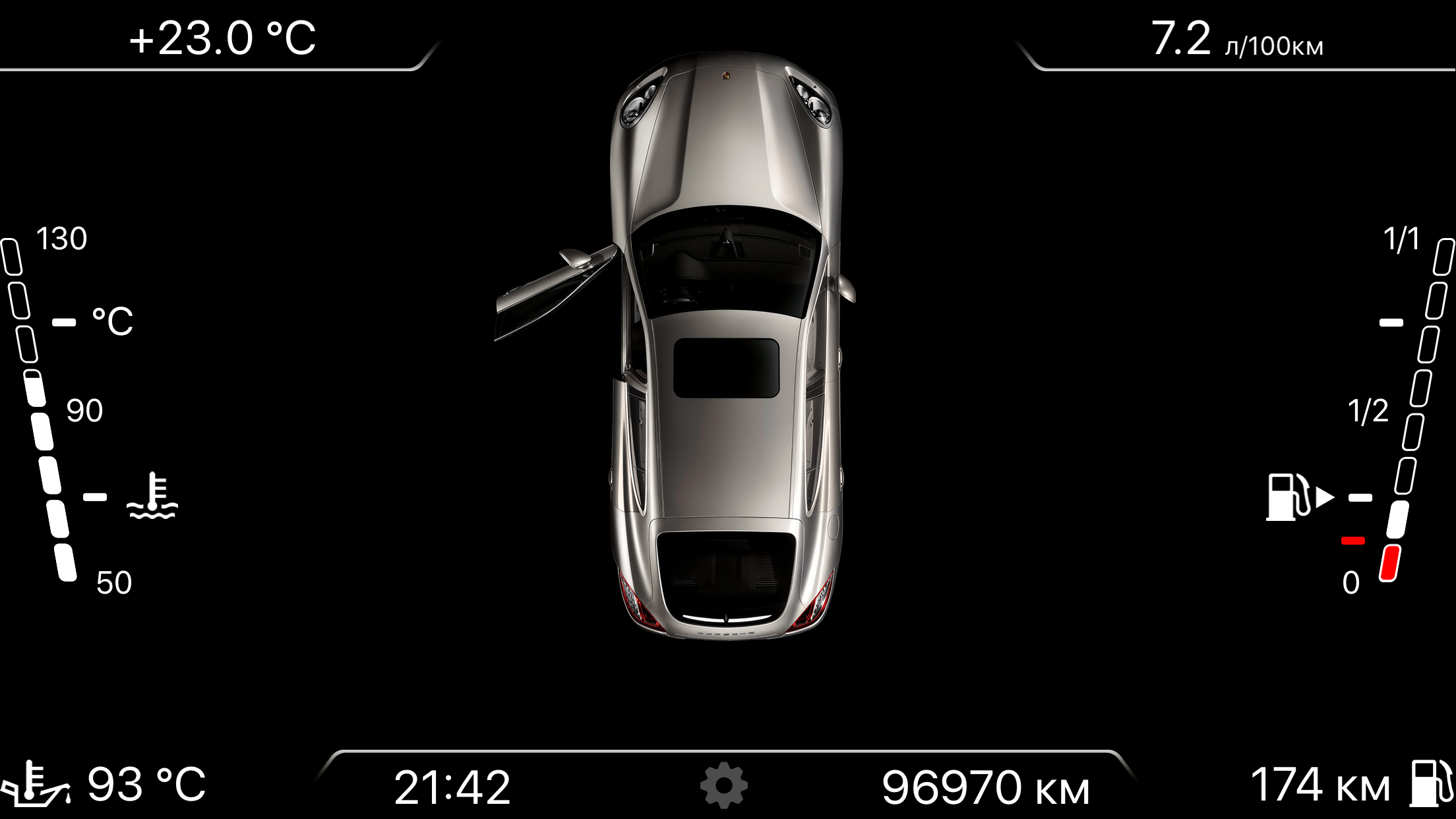
Софт панели приборов на python и kivy (ui framework)
Параллельно со сборкой самой панели приборов я вел разработку приложения для отображения информации с датчиков. В самом начале я не планировал какой либо дизайн.
Первая версия панели приборов
По мере разработки решил визуализировать данные более наглядно. Хотел гоночный дизайн, а получилось, что-то в стиле 80-х.

Вторая версия панели приборов
Продолжив поиски более современного дизайна я обратил внимание какие цифровые приборки делают автопроизводители и постарался сделать что-то похожее.

Третья версия панели приборов
Ранее, я никогда не разрабатывал графические приложения под Linux поэтому не знал с чего начать. Вариант на вебе простой в разработке, но слишком много лишних компонентов: иксы, браузер, nodejs, хотелось быстрой загрузки. Попробовав Qt PySide2 я понял, что это займет у меня много времени, т.к. мало опыта.
Kivy позволяет запускать приложение без Иксов, прямо из консоли, в качестве рендера используется OpenGL. Благодаря этому полная загрузка системы может происходить за 10 секунд.
import can
import os
import sys
from threading import Thread
import time
os.environ['KIVY_GL_BACKEND'] = 'gl'
os.environ['KIVY_WINDOW'] = 'egl_rpi'
from kivy.app import App
from kivy.properties import NumericProperty
from kivy.properties import BoundedNumericProperty
from kivy.properties import StringProperty
from kivy.uix.label import Label
from kivy.uix.image import Image
from kivy.uix.floatlayout import FloatLayout
from kivy.uix.widget import Widget
from kivy.uix.scatter import Scatter
from kivy.animation import Animation
messageCommands = { 'GET_DOORS_COMMAND': 0x220D, 'GET_OIL_TEMPERATURE' : 0x202F, 'GET_OUTDOOR_TEMPERATURE' : 0x220C, 'GET_INDOOR_TEMPERATURE' : 0x2613, 'GET_COOLANT_TEMPERATURE' : 0xF405, 'GET_SPEED' : 0xF40D, 'GET_RPM' : 0xF40C, 'GET_KM_LEFT': 0x2294, 'GET_FUEL_LEFT': 0x2206, 'GET_TIME': 0x2216
}
bus = can.interface.Bus(channel='can0', bustype='socketcan')# -*- coding: utf-8 -*-
import can
import os
import sys
from threading import Thread
import time
os.environ['KIVY_GL_BACKEND'] = 'gl'
os.environ['KIVY_WINDOW'] = 'egl_rpi'
from kivy.app import App
from kivy.properties import NumericProperty
from kivy.properties import BoundedNumericProperty
from kivy.properties import StringProperty
from kivy.uix.label import Label
from kivy.uix.image import Image
from kivy.uix.floatlayout import FloatLayout
from kivy.uix.widget import Widget
from kivy.uix.scatter import Scatter
from kivy.animation import Animation
messageCommands = { 'GET_DOORS_COMMAND': 0x220D, 'GET_OIL_TEMPERATURE' : 0x202F, 'GET_OUTDOOR_TEMPERATURE' : 0x220C, 'GET_INDOOR_TEMPERATURE' : 0x2613, 'GET_COOLANT_TEMPERATURE' : 0xF405, 'GET_SPEED' : 0xF40D, 'GET_RPM' : 0xF40C, 'GET_KM_LEFT': 0x2294, 'GET_FUEL_LEFT': 0x2206, 'GET_TIME': 0x2216
}
bus = can.interface.Bus(channel='can0', bustype='socketcan')
class PropertyState: def __init__(self, last, current): self.last = last self.current = current def lastIsNotNow(self): return self.last is not self.current
class CanListener(can.Listener): def __init__(self, dashboard): self.dashboard = dashboard self.speedStates = PropertyState(None,None) self.rpmStates = PropertyState(None,None) self.kmLeftStates = PropertyState(None,None) self.coolantTemperatureStates = PropertyState(None,None) self.oilTempratureStates = PropertyState(None,None) self.timeStates = PropertyState(None,None) self.outDoorTemperatureStates = PropertyState(None,None) self.doorsStates = PropertyState(None,None) self.carMinimized = True def on_message_received(self, message): messageCommand = message.data[3] | message.data[2] << 8 if message.arbitration_id == 0x77E and messageCommand == messageCommands['GET_SPEED']: self.speedStates.current = message.data[4] if self.speedStates.lastIsNotNow(): self.dashboard.speedometer.text = str(self.speedStates.current) self.speedStates.last = self.speedStates.current if message.arbitration_id == 0x77E and messageCommand == messageCommands['GET_RPM']: self.rpmStates.current = message.data[5] | message.data[4] << 8 if self.rpmStates.lastIsNotNow(): self.dashboard.rpm.value = self.rpmStates.current/4 self.rpmStates.last = self.rpmStates.current if message.arbitration_id == 0x35B: self.rpmStates.current = message.data[2] | message.data[1] << 8 if self.rpmStates.lastIsNotNow(): self.dashboard.rpm.value = self.rpmStates.current/4 self.rpmStates.last = self.rpmStates.current if message.arbitration_id == 0x77E and messageCommand == messageCommands['GET_KM_LEFT']: self.kmLeftStates.current = message.data[5] | message.data[4] << 8 if self.kmLeftStates.lastIsNotNow(): self.dashboard.kmLeftLabel.text = str(self.kmLeftStates.current) self.kmLeftStates.last = self.kmLeftStates.current if message.arbitration_id == 0x77E and messageCommand == messageCommands['GET_COOLANT_TEMPERATURE']: self.coolantTemperatureStates.current = message.data[4] if self.coolantTemperatureStates.lastIsNotNow(): self.dashboard.coolantLabel.text = str(self.coolantTemperatureStates.current-81) self.coolantTemperatureStates.last = self.coolantTemperatureStates.current if message.arbitration_id == 0x77E and messageCommand == messageCommands['GET_OIL_TEMPERATURE']: self.oilTempratureStates.current = message.data[4] if self.oilTempratureStates.lastIsNotNow(): self.dashboard.oilLabel.text = str(self.oilTempratureStates.current-58) self.oilTempratureStates.last = self.oilTempratureStates.current if message.arbitration_id == 0x77E and messageCommand == messageCommands['GET_TIME']: self.timeStates.current = message.data[5] | message.data[4] << 8 if self.timeStates.lastIsNotNow(): self.dashboard.clock.text = str(message.data[4]) ":" str(message.data[5]) self.timeStates.last = self.timeStates.current if message.arbitration_id == 0x77E and messageCommand == messageCommands['GET_OUTDOOR_TEMPERATURE']: self.outDoorTemperatureStates.current = float(message.data[4]) if self.outDoorTemperatureStates.lastIsNotNow(): self.dashboard.outDoorTemperatureLabel.text = str((self.outDoorTemperatureStates.current - 100)/2) self.outDoorTemperatureStates.last = self.outDoorTemperatureStates.current if message.arbitration_id == 0x77E and messageCommand == messageCommands['GET_DOORS_COMMAND']: self.doorsStates.current = message.data[4] if self.doorsStates.lastIsNotNow(): self.doorsStates.last = self.doorsStates.current self.dashboard.car.doorsStates=message.data[4] # all doors closed -> minimize car if self.doorsStates.current == 0x55: self.dashboard.minimizeCar() self.carMinimized = True else: if self.carMinimized: self.dashboard.maximizeCar() self.carMinimized = False
class Dashboard(FloatLayout): def __init__(self,**kwargs): super(Dashboard,self).__init__(**kwargs) # Background self.backgroundImage = Image(source='bg.png') self.add_widget(self.backgroundImage) # RPM self.rpm = Gauge(file_gauge = "gauge512.png", unit = 0.023, value=0, size_gauge=512, pos=(0,0)) self.add_widget(self.rpm) self.rpm.value = -200 # Speedometer self.speedometer = Label(text='0', font_size=80, font_name='hemi_head_bd_it.ttf', pos=(0,-15)) self.add_widget(self.speedometer) # KM LEFT self.kmLeftLabel = Label(text='000', font_name='Avenir.ttc', halign="right", text_size=self.size, font_size=25, pos=(278,233)) self.add_widget(self.kmLeftLabel) # COOLANT TEMPEARATURE self.coolantLabel = Label(text='00', font_name='hemi_head_bd_it.ttf', halign="right", text_size=self.size, font_size=27, pos=(295,-168)) self.add_widget(self.coolantLabel) # OIL TEMPERATURE self.oilLabel = Label(text='00', font_name='hemi_head_bd_it.ttf', halign="right", text_size=self.size, font_size=27, pos=(-385,-168)) self.add_widget(self.oilLabel) # CLOCK self.clock = Label(text='00:00', font_name='Avenir.ttc', font_size=27, pos=(-116,-202)) self.add_widget(self.clock) # OUTDOOR TEMPERATURE self.outDoorTemperatureLabel = Label(text='00.0', font_name='Avenir.ttc', halign="right", text_size=self.size, font_size=27, pos=(76,-169)) self.add_widget(self.outDoorTemperatureLabel) # CAR DOORS self.car = Car(pos=(257,84)) self.add_widget(self.car) def minimizeCar(self, *args): print("min") anim = Animation(scale=0.5, opacity = 0, x = 400, y = 240, t='linear', duration=0.5) anim.start(self.car) animRpm = Animation(scale=1, opacity = 1, x = 80, y = -5, t='linear', duration=0.5) animRpm.start(self.rpm) def maximizeCar(self, *args): print("max") anim = Animation(scale=1, opacity = 1, x=257, y=84, t='linear', duration=0.5) anim.start(self.car) animRpm = Animation(scale=0.5, opacity = 0, x = 80, y = -5, t='linear', duration=0.5) animRpm.start(self.rpm)
class Car(Scatter): carImage = StringProperty("car362/car.png") driverDoorClosedImage = StringProperty("car362/driverClosedDoor.png") driverDoorOpenedImage = StringProperty("car362/driverOpenedDoor.png") passangerDoorClosedImage = StringProperty("car362/passangerClosedDoor.png") passangerDoorOpenedImage = StringProperty("car362/passangerOpenedDoor.png") leftDoorClosedImage = StringProperty("car362/leftClosedDoor.png") leftDoorOpenedImage = StringProperty("car362/leftOpenedDoor.png") rightDoorClosedImage = StringProperty("car362/rightClosedDoor.png") rightDoorOpenedImage = StringProperty("car362/rightOpenedDoor.png") doorsStates = NumericProperty(0) size = (286, 362) def __init__(self, **kwargs): super(Car, self).__init__(**kwargs) _car = Image(source=self.carImage, size=self.size) self.driverDoorOpened = Image(source=self.driverDoorOpenedImage, size=self.size) self.passangerDoorOpened = Image(source=self.passangerDoorOpenedImage, size=self.size) self.leftDoorOpened = Image(source=self.leftDoorOpenedImage, size=self.size) self.rightDoorOpened = Image(source=self.rightDoorOpenedImage, size=self.size) self.driverDoorClosed = Image(source=self.driverDoorClosedImage, size=self.size) self.passangerDoorClosed = Image(source=self.passangerDoorClosedImage, size=self.size) self.leftDoorClosed = Image(source=self.leftDoorClosedImage, size=self.size) self.rightDoorClosed = Image(source=self.rightDoorClosedImage, size=self.size) self.add_widget(_car) self.add_widget(self.driverDoorOpened) self.add_widget(self.passangerDoorOpened) self.add_widget(self.leftDoorOpened) self.add_widget(self.rightDoorOpened) self.bind(doorsStates=self._update) def _update(self, *args): driverDoorStates = self.doorsStates&1 passangerDoorStates = self.doorsStates&4 leftDoorStates = self.doorsStates&16 rightDoorStates = self.doorsStates&64 if driverDoorStates != 0: try: self.remove_widget(self.driverDoorOpened) self.add_widget(self.driverDoorClosed) except: pass else: try: self.remove_widget(self.driverDoorClosed) self.add_widget(self.driverDoorOpened) except: pass if passangerDoorStates != 0: try: self.remove_widget(self.passangerDoorOpened) self.add_widget(self.passangerDoorClosed) except: pass else: try: self.remove_widget(self.passangerDoorClosed) self.add_widget(self.passangerDoorOpened) except: pass if leftDoorStates != 0: try: self.remove_widget(self.leftDoorOpened) self.add_widget(self.leftDoorClosed) except: pass else: try: self.remove_widget(self.leftDoorClosed) self.add_widget(self.leftDoorOpened) except: pass if rightDoorStates != 0: try: self.remove_widget(self.rightDoorOpened) self.add_widget(self.rightDoorClosed) except: pass else: try: self.remove_widget(self.rightDoorClosed) self.add_widget(self.rightDoorOpened) except: pass
class Gauge(Scatter): unit = NumericProperty(1.125) zero = NumericProperty(116) value = NumericProperty(10) #BoundedNumericProperty(0, min=0, max=360, errorvalue=0) size_gauge = BoundedNumericProperty(512, min=128, max=512, errorvalue=128) size_text = NumericProperty(10) file_gauge = StringProperty("") def __init__(self, **kwargs): super(Gauge, self).__init__(**kwargs) self._gauge = Scatter( size=(self.size_gauge, self.size_gauge), do_rotation=False, do_scale=False, do_translation=False ) _img_gauge = Image(source=self.file_gauge, size=(self.size_gauge, self.size_gauge)) self._needle = Scatter( size=(self.size_gauge, self.size_gauge), do_rotation=False, do_scale=False, do_translation=False ) _img_needle = Image(source="arrow512.png", size=(self.size_gauge, self.size_gauge)) self._gauge.add_widget(_img_gauge) self._needle.add_widget(_img_needle) self.add_widget(self._gauge) self.add_widget(self._needle) self.bind(pos=self._update) self.bind(size=self._update) self.bind(value=self._turn) def _update(self, *args): self._gauge.pos = self.pos self._needle.pos = (self.x, self.y) self._needle.center = self._gauge.center def _turn(self, *args): self._needle.center_x = self._gauge.center_x self._needle.center_y = self._gauge.center_y a = Animation(rotation=-self.value*self.unit self.zero, t='in_out_quad',duration=0.05) a.start(self._needle)
class requestsLoop(Thread): def __init__(self): Thread.__init__(self) self.daemon = True self.start() canCommands = [ can.Message(arbitration_id=0x714, data=[0x03, 0x22, messageCommands['GET_DOORS_COMMAND'] >> 8, messageCommands['GET_DOORS_COMMAND'] & 0xff, 0x55, 0x55, 0x55, 0x55], extended_id=False), can.Message(arbitration_id=0x714, data=[0x03, 0x22, messageCommands['GET_SPEED'] >> 8, messageCommands['GET_SPEED'] & 0xff, 0x55, 0x55, 0x55, 0x55], extended_id=False), can.Message(arbitration_id=0x714, data=[0x03, 0x22, messageCommands['GET_KM_LEFT'] >> 8, messageCommands['GET_KM_LEFT'] & 0xff, 0x55, 0x55, 0x55, 0x55], extended_id=False), can.Message(arbitration_id=0x714, data=[0x03, 0x22, messageCommands['GET_RPM'] >> 8, messageCommands['GET_RPM'] & 0xff, 0x55, 0x55, 0x55, 0x55], extended_id=False), can.Message(arbitration_id=0x714, data=[0x03, 0x22, messageCommands['GET_OIL_TEMPERATURE'] >> 8, messageCommands['GET_OIL_TEMPERATURE'] & 0xff, 0x55, 0x55, 0x55, 0x55], extended_id=False), can.Message(arbitration_id=0x714, data=[0x03, 0x22, messageCommands['GET_FUEL_LEFT'] >> 8, messageCommands['GET_FUEL_LEFT'] & 0xff, 0x55, 0x55, 0x55, 0x55], extended_id=False), can.Message(arbitration_id=0x714, data=[0x03, 0x22, messageCommands['GET_OUTDOOR_TEMPERATURE'] >> 8, messageCommands['GET_OUTDOOR_TEMPERATURE'] & 0xff, 0x55, 0x55, 0x55, 0x55], extended_id=False), can.Message(arbitration_id=0x746, data=[0x03, 0x22, messageCommands['GET_INDOOR_TEMPERATURE'] >> 8, messageCommands['GET_INDOOR_TEMPERATURE'] & 0xff, 0x55, 0x55, 0x55, 0x55], extended_id=False), can.Message(arbitration_id=0x714, data=[0x03, 0x22, messageCommands['GET_COOLANT_TEMPERATURE'] >> 8, messageCommands['GET_COOLANT_TEMPERATURE'] & 0xff, 0x55, 0x55, 0x55, 0x55], extended_id=False), can.Message(arbitration_id=0x714, data=[0x03, 0x22, messageCommands['GET_TIME'] >> 8, messageCommands['GET_TIME'] & 0xff, 0x55, 0x55, 0x55, 0x55], extended_id=False) ] def run(self): while True: for command in self.canCommands: bus.send(command) time.sleep(0.005)
class BoxApp(App): def build(self): dashboard = Dashboard(); listener = CanListener(dashboard) can.Notifier(bus, [listener]) return dashboard
if __name__ == "__main__": # Send requests requestsLoop() _old_excepthook = sys.excepthook def myexcepthook(exctype, value, traceback): if exctype == KeyboardInterrupt: print "Handler code goes here" else: _old_excepthook(exctype, value, traceback) sys.excepthook = myexcepthook # Show dashboard BoxApp().run()Алгоритм работы следующий, используется 3 потока:
- В главном потоке работаем с графическими элементы (спидометр, тахометр, часы, температуры и др) на экране
- Во втором потоке каждые 5 мс делаем опрос следующего датчика
- В третьем потоке слушаем CAN шину, получив ответ парсим его и обновляем соответствующий графический элемент
Работает стабильно, самый долгий процесс в разработке был связан с рисованием дизайна. На данный момент обкатываю решение и потихоньку пишу мобильное приложение для iOS, чтобы любой мог попробовать цифровую панель приборов.
Проект цифровой панель приборов открытый. Рад буду предложениям и комментариям!
Переходник vag 2×2: купить по выгодной цене от 750 рублей в москве, россии и снг. характеристики, фото, отзывы – carmod
Наша компания предоставляет услуги собственного сервисного центра по ремонту оборудования.
При наличии у устройства гарантии производителя ремонт производится в авторизованных сервисных
центрах. Срок гарантийного обслуживания и адреса центров указаны на сайте производителя.
Если производитель не предоставляет собственную гарантию на изделие, то гарантийный ремонт
производится в нашем сервисном центре.
Гарантийное обслуживание на товар не может быть предоставлено,
если:
• на
изделии имеются следы механического повреждения
• гарантийные
пломбы повреждены или отсутствуют
• не были соблюдены условия
эксплуатации, транспортировки или хранения товара
• ремонт
изделия производился не в авторизованном сервисном центре.
Возврат и обмен товара
В соответствие со ст. 26.1 Закона «О защите прав потребителей» возврат или обмен
товара надлежащего качества производится в течение 7 (семи) дней с момента получения. Возврат
товара надлежащего качества возможен в случае, если сохранены его товарный вид, потребительские
свойства, а также документ, подтверждающий факт и условия покупки указанного товара.
Потребитель не вправе отказаться от товара надлежащего качества, имеющего
индивидуально-определенные свойства, если указанный товар может быть использован исключительно
приобретающим его потребителем.
Технически сложный товар подлежит возврату или обмену только при наличии существенного недостатка
(согласно Перечню непродовольственных товаров надлежащего качества, не подлежащих возврату или
обмену на аналогичный товар других размера, формы, габарита, фасона, расцветки или комплектации,
утвержденному Постановлением Правительства РФ от 19.01.1998 г. № 55).
Решение о возврате или замене технически сложного товара принимается Продавцом по результатам
обязательной проверки качества в сертифицированном сервисном центре.




