

- Особенности моделей драйверов шд.
- Плавность хода, шум и момент шагового двигателя при управлении микроконтроллером
- Подключение и настройка драйвера шагового двигателя – вопросы по linuxcnc (emc, emc2)
- Ремонт и профилактика шагового двигателя
- Список диагностических кодов и возможные причины неисправности cvt lancer x outlander xl – mitsubishi автоэлектрика
Особенности моделей драйверов шд.
Последнее время появилось много разновидностей или клонов драйверов шаговых двигателей.
В описаниях продавцов, как правило, всё поверхностно. И все великолепно.
Предлагаю делиться опытом , кто что у себя использовал на ПРАКТИКЕ , и как оно себя показало.
Предлагаю для обсуждения драйверы серий 4,2 ампера, как самые распространенные среди самоделкиных.
В принципе, драйвер 4,2 а или драйвер 6 а отличаются друг от друга только выходными транзисторами, поэтому тема будет полезна и по этим сериям.
Начну с драйвера DM542A от продавца Longs Motor.
Покупал года 3 назад. Показали себя неплохо. Питал 24, 36, 45 вольт. Чем выше, тем стабильнее работают на повышенных оборотах.
Использовал с моторами 19 и 28 кгс. NEMA23 и 36 кгс NEMA34.
Некоторые элементы на плате содраны наименования.
Но они из строя не выходили.
Выгорали резисторы выходного каскада и полевые транзисторы. Причина – плохой контакт в соединении с ШД.
Детали копеечные, ремонт был несложным.
Каких то рекордов не увидел, но характеризую в целом положительно – недорого и надежно.


§
В моей практике драйверы от Leadshine всегда работали прекрасно. Данный драйвер, ST-M5045, продавцы на Али позиционируют как развитие ветки популярных у нас драйверов M542, 2M542, часто применяемые в небольших станках ЧПУ(до 4,2А, 24-50вольт):
ST-M5045 является экономически эффективным, hig производительность биполярный двухфазный микро-степпинг водитель применения чистого-синусоидальный ток метод управления. его производительность лучше, чем M542, 2M542 приводы. лучше всего подходит для приложений, что желаемый extreme низкий уровень шума и тепла. он хорошо работает в среде, где электроснабжение нестабильность опыт и колебания, с автоматической оптимизации speedctrol техника, выход Powerstep серии езды является очень стабильным, с почти нулевой вибрации и шума, выполняя близко к следящей системы, что позволяет двигателю работать плавно. это помогает выполнить требование дизайн низкий уровень шума, низкая тепло nd высокой производительности.
Я думаю, репутация Лидшайна может обнадежить, что это хорошая покупка, недорого и вполне прилично.
§
Если вы о том, какое напряжение питания подавать на драйвер, то я вам ответил выше. А если вы спрашиваете о напряжении на входах PU и DR, то согласно мануала на этот драйвер: на логику PU и DR подаётся 5в, есть драйвера с управляющим напряжением 5 и 24в, 5-ти вольтовый вы сразу можете подключить к свой плате, а вот тот что с наклейкой 24в нужно переделать, убрав резистор. Проще это сделать вскрыв и сравнив цепи управления обоих драйверов.
На V и -V подаёте напряжение питания от блока питания 24-80V.
Плавность хода, шум и момент шагового двигателя при управлении микроконтроллером
Далее опишу алгоритм управления ШД с помощью микроконтроллера.
Перед тем, как начать описывать задачу, я изложу основы управления ШД, которые будут включать необходимый минимум для рассмотрения, описанных в статье способов управления.
Рассмотрим необходимый минимум основ управления ШД , необходимый для понимания принципа управления, описанного ниже. А именно:
ШД имеют 4,5,6 или 8 выводов обмоток. При подключении к модулю управления ШД в каждом конкретном случае необходимо задействовать определенные выводы. В четырех выводном ШД задействуются все четыре вывода. Пяти выводной ШД не подходит для метода управления, описываемого в этой статье. В шести выводном не задействуются выводы нейтральных точек. В восьми выводном ШД обмотки соединены последовательно (см. рис. 1). Конечно можно задействовать все выводы обмоток, но эти методы управления выходят за рамки статьи.

Описание полношагового режима управления.
Для управления ШД необходимо подавать определенную последовательность сигналов на обмотки ШД . По сути создавая статором бегущую волну, заставляющую синхронно вращаться поле статора и ротора ШД . На рис. 2 над диаграммой схематично показан статор с обмотками. Цвет обмоток указывает на их полярность. В центре находится ротор в виде магнита. Если обратить внимание на диаграмму, то будет видно, что в середине каждого шага идет поочередное изменение полярности обмоток. В след за изменяющимся полем статора, вращается ротор по часовой стрелке. Для изменения вращения двигателя можно поменять местами выводы одной обмотки, и ротор начнет вращаться в противоположную сторону. Но зачем менять подключение обмоток, если можно программным путем поменять местами подаваемые сигналы, что и сделано с А и А- на рис.2. При этом ротор также начнет вращаться в противоположную сторону. Для большей наглядности сигнал на диаграмме имеет прямоугольную форму. Далее в статье прямоугольный сигнал будет заменен на сигнал ШИМ, модулирующий синусоиду.

Изменить полярность обмотки можно с помощью Н-транзисторного моста (см. рис. 3). В первом варианте из 4 транзисторов открыты Т1,Т4. Ток, соответственно, течет через них. Поменять полярность можно, открыв транзисторы Т2 ,Т3 и при этом закрыв Т1 И Т4. Таким образом, ток через обмотку потечет в противоположную сторону.

Для управления ШД используют два Н моста чаще всего на основе восьми N-канальных MOSFET транзисторов. Для управления транзисторами используются мостовые или полумостовые драйверы. Напряжение на затворе зачастую должно быть выше напряжения истока транзистора на 5-15В. Для MOSFET транзисторов это делают драйверы.
Кроме того, драйверы силовых ключей, в отличие от простых преобразователей уровня, снабжены множественными механизмами защиты как самого драйвера, так и управляемых ключей. Это позволяет выполнять формирование выходных управляющих сигналов согласно определенным алгоритмам, чтобы предотвратить выход системы из строя в аварийной ситуации.
Механизм встроенного временного промежутка Dead-Time обеспечивает гарантированное закрытие одного силового ключа до момента начала открытия ключа в противоположном плече. Гарантией надежного закрытия противоположного транзистора является встроенная схема, контролирующая состояние ключей и наличие схемы задержки, формирующей промежуток времени, в течение которого закрыты оба транзистора в плечах полумоста.
На рис.4 приведена принципиальная электрическая схема управления ШД, включающая в себя 4 драйвера полумоста IR2104S и 2 Н-моста на основе транзисторов IRF7836. При подаче 0 В на вход SD драйвера IR2104s драйвер переходит в неактивное состояние.
На приведенной схеме сигнал с диаграмм можно подавать на 4 входа. Так на ШИМ1 А , на ШИМ2 А-, на ШИМ3 В , на ШИМ4 В- соответственно (Рис.4).

Ниже кратко опишу принцип работы ШИМ, расчет и модулирование синусоиды.
ШИМ или PWM (широтно-импульсная модуляция или pulse-width modulation) – это способ изменения мощности, подаваемой на нагрузку. Управление заключается в изменении ширины импульса постоянной амплитуды, следующих через равные интервалы времени.
На рис.5 видно, как регулируется мощность. Так 20%, 40%, 80%, 100% это время, когда транзистор открыт относительно времени периода. Соответственно среднее напряжение будет приблизительно равно 20%, 40%, 80%, 100% от максимального.

Меняя ширину импульса, можно модулировать различную форму сигнала. Так, по синусоидальному закону, при котором ширина импульсов изменяется следующим образом (рис. 6), максимальна в середине шага, а к началу и концу шага уменьшается. Синусоиду можно увидеть на осциллографе, пропустив ШИМ-сигнал с контроллера через RC фильтр. Для RC фильтра использовал конденсатор 2.2 нФ и резистор 1.5кОм.
На рис. 6 показан пример модуляции одного синусоидального шага, состоящего всего из 4 уровней напряжения. Напряжение питания 12В.

Для формирования модулированного сигнала необходимо рассчитать уровни ШИМ и их количество на один шаг. На рис.7 приведено два примера одного синусоидального шага с разным количеством ШИМ уровней, где ШИМ можно изменять в пределах от 0 до 255, что соответствует напряжению от 0 до 100%. Как видно на рис.7, чем больше уровней ШИМ, тем больше форма модулированного сигнала будет повторять синусоиду. Каждое изменение ШИМ происходит по прерыванию таймера в микроконтроллере. Меняя время срабатывания прерывания, можно регулировать время одного шага соответственно и скорость двигателя.

Формулу для расчета ШИМ уровней можно получить из формулы мгновенных значений синусоидальных функции. U = Um*sin(ω*t Ψ)

Um – амплитудное значение ω – угловая частота Ψ – начальный фаза, значение фазы в начальный момент t=0 аргумент ω*t Ψ – называют фазой синусоидальной функции
Для расчета Ψ = 0
Синусоида от 0 до Т/4 повторяет форму половины шага, а от T/4 до Т/2 зеркально отображает вторую половину шага. Поэтому для расчета достаточно взять участок от 0 до Т/4 или от 0° до 90°. ωt – для удобства можно заменить на угол α = 0° до 90°. Um заменим на максимальное значение ШИМ_max в примере 255. U заменим на ШИМ_N. Получается ШИМ_N = ШИМ_maxSIN(α). Количество вычислений уровней ШИМ зависит от величины точности к примеру 16 с шагом угла 90°/16 = 5,625°
Пример:
ШИМ_0 = 255*SIN(5,625°*0)= 0
ШИМ_1 = 255*SIN(5,625°*1)= 24,99 ≈25
ШИМ_2 = 255*SIN(5,625°*2)=49,74≈50
. . .
ШИМ_16 = 255*SIN(5,625°*16)=255
Значения ШИМ необходимо округлять, так как оно может быть только целым.
Вычислив уровни ШИМ, можно модулировать синусоиду. Для этого я занес значения уровней в массив по прерыванию от таймера, поочередно подставляя значения от ШИМ_0 до ШИМ_16 в ШИМ контроллера. Так модулируется половина шага. Для модуляции второй половины нужно наоборот подставлять значения от ШИМ_16 до ШИМ_0.
Так модулируется один шаг. Меняя время срабатывания таймера можно менять время шага. Теперь такие синусоидальные шаги можно подавать, заменив прямоугольные шаги на диаграммах (рис.2).
Для удобства я написал небольшую программу для расчета значений ШИМ . Где PWM_MAX присваивается максимальное значение ШИМ, которое настраивается в микроконтроллере, а sampling присваивается количество уровней ШИМ на половину шага. Так как большинство программируют МК на языке С, данную программу я решил написать на этом же языке.
#include <stdio.h>
#include <math.h>
#define PI 3.14159265
#define PWM_MAX 255 //максимальное значение ШИМ.
#define sampling 16 // количество уровней напряжения на половину шага.
int i; int main() {for(i=0;i<=sampling;i ) {printf("%dn",(int)(PWM_MAXsin((double)90/sampling * PIi/ 180) 0.5));}; return 0; } Выходные данные
0 25 50 74 98 120 142 162 180 197 212 225 236 244 250 254 255
На этом необходимый минимум основ управления ШД завершается. Далее будет описана поставленная задача, возникшие трудности и их решение.
Задача: Двигатель должен вращать массу около 7кг за 0,7 – 1 секунду на 90°. Угол поворота отслеживает 10 разрядный или 1024 битный абсолютный энкодер AS5040 закрепленный на валу механизма. При достижении 90° необходимо включить режим удержание ШД. При этом необходимо учитывать воздействие руки человека, толкающей механизм по направлению движения или против, либо удерживающей вплоть до остановки. При этом напряжение питания блока управления ограничено двенадцатью вольтами, а габариты двигателя ограничены по ширине 100мм, а по длине 110мм, включая длину вала. В наличии было три двигателя подходящих габаритов.
Осовные характеристики двигателей:
двигатель №1 Рабочий ток 3,1 А. Активное сопротивление обмотки 1,5 Ом Индуктивность обмотки 3,5 мГн. Момент удержания 0,3 кг*м Величина полного шага 1,8° (200 шагов на один оборот ротора).
двигатель №2 Рабочий ток 4А. Активное сопротивление обмотки 0,8 Ом. Индуктивность обмотки 3,1 мГн. Момент удержания 0,45 кг*м. Величина полного шага 1,8° (200 шагов на один оборот ротора).
двигатель №3 не соответствовал характеристикам, заявленным производителем. Производитель утверждал, что он является аналогом двигателя №2. При замере активного сопротивления обмоток выяснилось, что сопротивление не соответствовало заявленным 0,8 Ом, а составляло всего 0,2 Ом. Следовательно, рабочий ток и индуктивность тоже отличались.
Изначально решить поставленную задачу я планировал с помощью готового блока управления ШД. Было испытано около пяти готовых блоков управления ШД разной ценовой категории и разных производителей. У всех были приблизительно одни и те же результаты, которые будут описаны ниже.
При испытании двигатель №3 по шуму и вибрациям отличался от первых двух в худшую сторону. Также было замечено, что все блоки управления с этим двигателем сильно грелись. Было решено больше не использовать этот двигатель.
Проблема №1. Свист двигателя. При уменьшении тока на блоках управления шум становился меньше, двигатель более плавно вращает ротор, и всё-таки шум и плавность вращения оставляли желать лучшего. При увеличении дробления шага на блоках управления до 1/16 шум уменьшился, и плавность хода увеличилась, но эти улучшения были незначительны. Дальнейшее повышение дробления вплоть до 1/512 не привело к улучшению показателей.
Решение проблемы №1. Решил сделать свой драйвер управления ШД на основе микроконтроллера PIC18F2331. Он заточен под управление двигателями. Было задействовано 4 канала широтно-импульсной модуляции для управления 4 драйверами полумоста.
Я начал эксперименты с формой сигнала, модулируемого с помощью ШИМ. Подавал треугольный, прямоугольный, трапециевидный сигналы на обмотки двигателя. Результаты: неутешительные показатели по шуму, вибрации и плавности хода были значительно хуже по сравнению с готовыми блоками управления. Подавая на обмотки двигателя синусоидальный сигнал, плавность хода, начиная от 5 об/мин и выше, стала практически незаметной на глаз. Детали механизма не гремели, но если скорость была ниже 5 об/мин, детали гремели, механизм передвигался рывками, ток потребляемый двигателем рос и выходил за пределы рабочего тока двигателя. Что касается шума, даже при скорости выше 5 об/мин был неприятный шум. Свист похожий на звук, издаваемый зарядными устройствами для телефонов ноутбуков, только гораздо сильнее. Такой же шум я слышал от асинхронных двигателей, управляемых частотными преобразователями. Изучив работу частотных преобразователей, стало ясно, что свист зависит от частоты ШИМ. У меня частота ШИМ составляла 4кГц. При изменении частоты свист менялся, и когда я поднял частоту до 20кГц, шум полностью пропал. Слух человека в большинстве случаев не воспринимает частоту выше 20кГц.Так была решена проблема №1.
Проблема №2. Двигатель ниже 5 об/мин двигается рывками, а ток сильно возрастает, так как у драйвера нет обратной связи по току, соответственно и контроля по перегрузке тоже нет.
Решение проблемы №2. Когда напряжение питания драйвера с 12V снизил до 9V, рывки при передвижении механизма тоже стали меньше, но всё равно недостаточно плавно. Тогда напряжение выставил 12V, а амплитуду ШИМ синусоиды начал уменьшать, и при 20% амплитуды от максимума движение было плавным и тихим.
Проблема №3. Если запустить двигатель сразу на большой скорости без разгона, то момент на валу двигателя будет недостаточным для вращения механизма. Начнется пропуск шагов, сопровождаемый сильным шумом, который распространяется по всему корпусу механизма. Звук напоминал ведро с болтами, которое трясут изо всех сил. Так как необходимо было провернуть механизм на 90° за 0,7 – 1 сек., я решил, что до 45° буду линейно ускоряться, а с 45° до 90° линейно замедляться. Достигнуть даже приближённо времени в 1сек не удалось. Еще было замечено при старте, что первый шаг периодически сопровождался рывком ротора. Это связанно с тем, что зубцы ротора могут находиться не на оси включенной обмотки статора. В следствие чего зубцы ротора стремительно притянутся к обмотке, произойдёт фиксация ротора, сопровождающаяся звуком, похожим на удар. Все последующие шаги будут плавными.
Решение проблемы №3 . Рассматривая график зависимость оборотов двигателя и момента, я заметил, что момент при малых оборотах высокий, а с увеличением оборотов нелинейно падает, и чем меньше напряжение питания, тем хуже зависимость.
Для примера покажу график Рис.9. Взятый из даташита.
На двигатель FL86STH156-6204 ток фазы 6,0 А. Максимальный постоянный ток потребления от источника питания 3,8 А для блока SMD-9.0 Блоки управления SMD-9.0 (напряжение 72В) и SMD-82 (напряжение 220В) Дробление шага ½, источник питания 72 В, 300 Вт.

Чем больше напряжение подается на обмотки ШД, тем быстрее идет нарастание тока в них. Соответственно зависимость момента от скорости улучшается.
В моем случае питание 12В и диапазон допустимых скоростей невысок, так как момент стремительно падает с увеличением скорости.
Так как при равномерном ускорении не удавалось разогнать механизм. Я решил разделить ускорение на три диапазона. Первый при скорости ниже 5 об/мин ускорение максимально, так как момент максимально высокий. Второй диапазон от 5 до 7 об/мин ускорение уже в три раза меньше и последний третий диапазон от 7 об/мин и выше, ускорение в десять раз меньше относительно первого диапазона. Таким образом двигатель набирал максимально быстро скорость в начале пути и укладывался в 1с. Нелинейно разгоняя двигатель, можно значительно сократить время разгона ШД. Замедление механизма проходило в обратном порядке. Так как сохраненной осциллограммы сигнала, подаваемого на драйверы полумостов, у меня не осталось, я нарисовал, как, примерно, должна выглядеть осциллограмма.

При старте, первый шаг периодически сопровождался рывком ротора. Удар можно убрать, путем снижения амплитуды первой половины шага (в моем случае 20% от максимума) и значительно увеличив время первой половины шага по сравнению с другими шагами. Как видно на рис.10, первые половины шагов более вытянуты, чем правые. Это связанно с ускорением. Форма синусоиды искажается, но при этом двигатель работает достаточно плавно и тихо. Как видно на рис.10, ускорение максимально, это заметно по сужению шагов в начале движения. Когда момент максимален, а по мере приближения к максимальной скорости ускорение значительно меньше от изначального. Все диапазоны ускорений подбирались экспериментальным путем. Как регулировать амплитуду и ускорение я описал ранее в этой статье.
Проблема №4. Учет воздействия руки на механизм, если не учитывать воздействие руки, то можно было обойтись парой индуктивных датчиков или оптических датчиков для отслеживания крайних положений и направления вращения. А если учитывать воздействие руки, то без датчика угла поворота (абсолютного энкодера) не обойтись. Если механизм находится в движении, а рука хватает его и удерживает на месте, начинается пропуск шагов и сильный шум. По датчику будет видно, что вал колеблется на месте, и двигатель необходимо отключить и попытаться стартовать через заданный промежуток времени. Эта задача легко решаема. Если рука потянула механизм против направления, по датчику можно легко понять, что механизм вращается в противоположную сторону, и тоже отключить двигатель. И совсем другое дело, воздействие на механизм с увеличением скорости перемещения больше заданной изначально или наоборот притормаживание. Логично было измерять скорость перемещения и подстраиваться, чтобы скорость двигателя совпадала с движением руки, но оказалось, что 10 разрядный датчик as5040 не позволял этого сделать. Предположим, что нужно отслеживать перемещение каждые 1,05° .Так как 10 разрядов это 1024 бита, то вычисляем точность 360°/1024 = 0,35°, количество градусов на один бит возьмём 0,35°3 = 1,05°. Зная время, за которое двигатель проходит 1,05°, можно вычислить скорость. Но не все так просто. У датчика есть погрешность – биение младшего бита, то есть погрешность в один бит, а при измерении скорости нужно сделать два замера пройденного пути. В начале и в конце соответственно погрешность удваивается и составляет 0,35°2=0,7°. Измерить скорость каждые 1,05° невозможно. Логично измерять, например, каждые 0,35°*15=5,25°. Уже можно оценить скорость, но 5,25° это слишком большой угол, двигатель успеет пройти почти 3 шага или более точно 5,25°/1,8°= 2,92.
Решение проблемы №4. Целесообразно для измерения скорости использовать 12 разрядный датчик это 4096 бит. Точность измерения увеличится в четыре раза, что позволит точно подбирать скорость движения механизма под скорость движения руки.
Так была решена последняя проблема.
Думаю, эта статья принесет практическую пользу и поможет читателю лучше понять принципы управления шаговым двигателем.
В данной статье я опишу решение поставленной мне задачи по снижению шума и повышению плавности движения механизма, движимого шаговым двигателем (далее просто ШД) при ускорении. Данная задача довольна специфична. Описанное мною решение будет полезно при разработке модулей управления ШД .
Подключение и настройка драйвера шагового двигателя – вопросы по linuxcnc (emc, emc2)
Определение и изменение значения микрошага на который настроен драйвер.
Определние на какой микрошаг настроен драйвер шагового мотора для чайников.
Откройте блок блок управления и найдите место,
где в нём установлены коробочки примерно такого вида:
Число коробочек и число осей станка должно совпадать.
если есть поворотная ось,то для неё как может быть отдельная коробочка,как и нет.
В этом случае вам при продаже станка должны были сказать,
что поворотная ось подключается вместо одной из линейных осей.
Также на станках улучшенной конструкции на некоторые оси может быть установлен не один мотор,
а два в крайнем положении оси каждый.
Такая конструкция делается для того,чтобы более точно позиционировать инструмент по краям рабочего поля.
При правильном подключении такие моторы подключаются к ЧПУ не зависимо друг от друга и то,
что они управляют одной осью задаётся соответсвующими настройками внутри ЧПУ собственно.
На одной из коробочек найдите таблицу соответствия числа шагов и положения переключателей для настройки микрошага.
Выглядит обычно эта таблица так: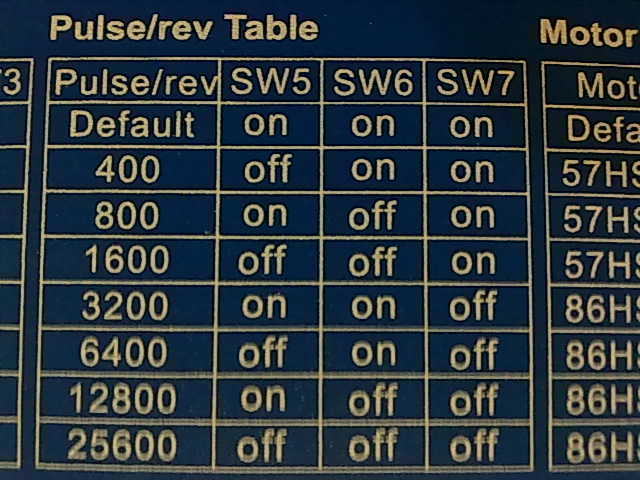
Первый столбец этой таблицы назван Pulse/Rev,то есть число шагов на один оборот двигателя.
Вообще говоря,хотя угол,на который поворачивается двигатель при одном полном шаге и стандартен,
но в стандарте есть и другие значения угла поворота двигателя при полном шаге.
Например LeadShine производит двухфазные двигатели с углами поворота в 0,9 и 1,8 градуса.
Соответственно на один оборот будет приходиться в первом случае 360/0,9=400 шагов.
Во втором случае только 200.
Но тем не менее в таблице указан не микрошаг,а число шагов на оборот для конкретного двигателя.
Чтобы получить от туда микрошаг разделим число шагов на оборот в каждой строке на число
шагов двигателя для которого сделана таблица.
Для какого двигателя делалась таблица на каробке драйвера не объясняется,поэтому будем его угадывать.
Наиболее распространённый вариант двигателя имеет 200 шагов на оборот.
Делим на него числа из таблицы и получаем последовательность
200:200=2^0=1 (Целый,не дроблёный шаг,в таблице вместо 200 стоит слово default )
400:200=2^1=2
800:200=2^2=4
1600:200=2^3=8
3200:200=2^4=16
6400:200=2^5=32
12800:200=2^6=64
25600:200=2^7=128
Отношения совпадают со степенями двойки,так что похоже,что предположение о том,
что таблица составлена для двигателя с 200 шагами на оборот правильное.
То что указано справа и есть микрошаг – отношение числа микрошагов к одному полному шагу двигателя.
Чтобы определить на какой микрошаг настроен драйвер,посмотрим на названия других столбцов таблицы.
Они называются SW5,SW6 и SW7.
Так обычно называют всякие переключатели и выключатели.
Теперь поищем их,обычно они находятся на верху между двумя группами клем,
но могут быть выведены и в другом месте.
Осматриваем драйвер и находим вот это:
Переключатель справа круговой,а значит принимать сразу значения из всех трех столбцов не может.
А вот слева есть набор из 8 тумблеров и так как никаких других переключателей у драивера нет,
предпологаем.чтоименно их и имеют ввиду в этой таблице и смотрим на положение 5,6 и 7 тумблера соответственно.
Видим что все они в верхнем положении,но что это значит,ON или OFF?
Слева внизу на тумблере есть надпись ON и указывающая на него стрелка.
Значит положение переключателя внизу означает что он включен (ON).
А все три переключателя в верхнем положении,значит они в состоянии OFF.
Ищем соответствующею строку в таблице и видим,что ей соответствует микрошаг 128.
При таком микрошаге драйвер может работать не стабильно,поэтому уменьшим его 8.
Смотрим в таблице положение выключателей для такого микрошага и видим,
что для перенастройки драйвера на него надо переключатели SW5,SW6 надо оставить в положении OFF,
а переклячатель SW7 опустить в низ в состояние ON.
Выключам станок,коли он у вас был включен и переключаем тумблеры.
Готово,теперь у нас микрошаг 8 и теперь остаётся только соответственно перенастроить ЧПУ,
а то будет изменение маштаба в 128:8 раз.
§
§
Ремонт и профилактика шагового двигателя
Шаговый двигатель многим кажется нерарешимой загадкой и не зря. Его капризный нрав заставит оказаться в неловком положении любого уважающего себя электрика. Сейчас я хочу рассмотреть элементарные моменты эксплуатации шагового двигателя, без которых на мой взгляд невозможно достойно сделать простую профилактику этой электрической машине.
Ротор этого двигателя представляет собой сильно намагниченный цилиндр с ярко выраженным профилем в продольном исполнении. В таком же стиле выполнен профиль статора. Соответственно в работе этого двигателя фиксация равнодействующего магнитного поля играет решающую роль.
Что же может стать возмутителем спокойствия, вернее нормальной работы? Да хотя бы куссочек технологтческой стружки от обработки самого двигателя. Прежде, чем начать разборку двигателя, необходимо создать для этого условия:
1.Чем меньше двигатель по размерам, тем они должны быть жёсче.
2.Должна быть идеальная чистота на рабочем месте, какую только Вы можете себе представить.
3.Должен быть идеально чистым инструмент, которым Вы собраетесь работать и его наличие, о чём нужно позаботиться заранее.
4.Должны быть в наличии к примеру два-три полиэтиленовых пакета подходящих размеров и чистая обёрточная бумага. Все тряпки необходимо убрать.
5.Самое трудное, что нужно обеспечить, так это наличие сжатого воздуха давлением примерно 6 атм.
Вот такие нехитрые требования, которые могут привести Вас к положительному результату. Обычно торцевые крышки шаговых двигателей выполняются из немагнитных материалов, да ещё используются всевозможные сальники и всё для того, чтобы обеспечить внутри идеальную возможную чистоту.
Снятая задняя крышка
Допустим, Вы отвинтили штыри, вынули их, сняли крышки.
Снятая передняя крышка
Как вытащить ротор? Дело в том, что только стоит снять переднюю крышку, как он мгновенно прилипает к статору, причём казалось бы намертво. Вот тут нужны достаточно опытные и крепкие человеческие руки. Как вариант предлагаю подложить полиэтиленовый пакет на колени, взять ладонями за корпус двигателя и опереться между ног.
Со стороны задней крышки через выколотку, (если есть, латунную) несильными ударами молотка второй учаастник должен выбить ротор вниз. Он пойдёт постепенно и сразу его зворачивайте в полиэтиленовый пакет. Даже соприкосновеное с одеждой чревато неприятными последствиями.
Вид на ротор при вытаскивании из статора шагового двигателя
Затем необходимо тчательно проверить поверхность ротора:
Вид ротора для осмотра и чистки
и статора на наличие посторонних частичек , особенно металла:
Статор шагового двигателя
В данном случае причиной разборки шагового двигателя явилось проявление продольного люфта ротора двигателя, потеря его мощности и появление резонанса при вращении с нагрузкой. Как выяснилось в дальнейшем, лопнуло опорное пружинное кольцо в задней части двигателя.
Старое лопнувшее стальное кольцо и новое из фторопласта
Причём кусочек застрял между полюсов ротора. Очистка поверхностей ротора и статора производилась сильной струёй сжатого воздуха. Ещё раз обращаю Ваше внимание на то, что использовать ветошь, кисти, даже чистые не допустимо.Кольца нужного размера найти не удалось, поэтому попробовали выточить кольцо из фторопласта толщиной 1,8 мм.
После сборки оказалось, что ротор вращается недопустимо туго, значит нужно было ещё уменьшаь толщину кольца. Но тут кольцо всё-таки нашлось, из одного электроцеха нашли от старого асинхронного двигателя диаметром 36мм при диаметре обоймы подшипника 37 мм.
После сборки двигатель заработал, но потом была допущена ошибка, при насадке на вал двигателя шкива использовали удары молотка по окружности. Двигатель сразу пошёл в резонанс. Эта была ошибка в сборке. Пришлось снова разобрать двигатель и проанализировать возможные варианты.
Была установлена ещё одна возможная причина некачественной сборки. Это следы герметика на крышках и статоре. То есть герметик возможно нарушал первоначальное положение статора и ротора. Сопредельные участки были тчательно вычищены и двигатель снова собран.
На этот раз он заработал. Даже неплохо, но при полной нагрузке стартовал с признаками резонанса. Поэтому было принято решение снизить нагрузку на двадцать процентов. Пока всё хорошо работает. Хотя не даёт покоя мысль, что и в блоке тоже появилась какя-то неисправность. Как проверить? Однако усилия, я считаю не пропали даром, основные принципы разборки и сборки двигателя были определены.
Список диагностических кодов и возможные причины неисправности cvt lancer x outlander xl – mitsubishi автоэлектрика
- Подробности
- Опубликовано 18.08.2021 23:32
- Автор: Виктор Мартынов
- Просмотров: 31981
| № диагностического кода | Пункт диагностики | ФУНКЦИИ ДИАГНОСТИКИ | ВОЗМОЖНЫЕ ПРИЧИНЫ |
| P0703 | Неисправность выключателя стоп-сигнала | ECU вариатора выявляет неисправность с помощью сигнала выключателя стоп-сигнала от ETACS-ECU. | • Неисправная работа шины CAN • Неисправность выключателя стоп-сигнала • Поврежден жгут электропроводки или разъемы • Неисправность ECU вариатора • Неисправность ETACS-ECU |
| P0705 | Неисправность переключателя блокировки | ECU вариатора контролирует поступление сигнала от переключателя блокировки и определяет наличие/отсутствие входного сигнала, отклоняющегося от нормы. | • Неисправность переключателя блокировки • Неправильная регулировка троса управления коробкой передач • Поврежден жгут электропроводки или разъемы • Неисправность ECU вариатора |
| P0710 | Неисправность датчика температуры рабочей жидкости вариатора | ECU выявляет неисправности путем контроля напряжения на клеммах датчика температуры рабочей жидкости вариатора. | • Неисправность блока клапанов в сборе (вышел из строя датчик температуры рабочей жидкости вариатора) • Поврежден жгут электропроводки или разъемы • Неисправность ECU вариатора |
| P0711 | Неисправность датчика температуры рабочей жидкости вариатора(Не нормальные значения датчика температуры рабочей жидкости вариатора) | ECU выявляет неисправности путем контроля напряжения на клеммах датчика температуры рабочей жидкости вариатора. | • Неисправность датчика температуры рабочей жидкости вариатора • Неисправность системы охлаждения рабочей жидкости вариатора и масляного насоса • Неисправность ECU вариатора |
| P0712 | Неисправность датчика температуры рабочей жидкости вариатора (короткое замыкание) | ECU выявляет неисправности путем контроля напряжения на клеммах датчика температуры рабочей жидкости вариатора. | • Неисправность блока клапанов в сборе (вышел из строя датчик температуры рабочей жидкости вариатора) • Поврежден жгут электропроводки или разъемы • Неисправность ECU вариатора |
| P0713 | Неисправность датчика температуры рабочей жидкости вариатора (обрыв) | ECU выявляет неисправности путем контроля напряжения на клеммах датчика температуры рабочей жидкости вариатора. | • Неисправность блока клапанов в сборе (вышел из строя датчик температуры рабочей жидкости вариатора) • Поврежден жгут электропроводки или разъемы • Неисправность ECU вариатора |
| P0715 | Неисправность датчика частоты вращения ведущего шкива | ECU вариатора определяет наличие неисправности по резкому изменению показаний датчика частоты вращения ведущего шкива или по несовпадению показаний данного датчика и других датчиков. | •Неисправность датчика частоты вращения ведущего шкива •Поврежден жгут электропроводки или разъемы •Неисправность ECU вариатора |
| P0720 | Неисправность датчика частоты вращения ведомого шкива | ECU вариатора определяет наличие неисправности по резкому изменению показаний датчика частоты вращения ведомого шкива или по несовпадению показаний данного датчика и других датчиков. | •Неисправность датчика частоты вращения ведомого шкива •Поврежден жгут электропроводки или разъемы •Неисправность ECU вариатора |
| P0725 | Неправильные обороты двигателя | ECU вариатора определяет отклонение от нормы сигнала оборотов двигателя, полученного от ECU двигателя путем сравнения частот вращения ведущего и ведомого шкивов. | •Неисправная работа шины CAN •Неисправность системы двигателя •Неисправность ECU вариатора |
| P0740 | Неисправность электромагнитного клапана блокировки | ECU вариатора определяет неисправность, выявляя отклонения в работе электромагнитного клапана блокировки. | •Неисправность блока клапанов в сборе (вышел из строя электромагнитный клапан блокировки) •Поврежден жгут электропроводки или разъемы •Неисправность ECU вариатора |
| P0741 | Отклонения в работе блокировки | Отклонение выявляется ECU вариатора в том случае, если скорость проскальзывания гидротрансформатора при включении блокировки остается высокой. | •Отклонение давления в магистрали •Неисправность ECU вариатора |
| P0745 | Неисправность электромагнитного клапана давления в магистрали | ECU вариатора определяет неисправность, выявляя отклонения в работе электромагнитного клапана регулировки давления в магистрали. | •Неисправность блока клапанов в сборе (вышел из строя электромагнитный клапан регулировки давления в магистрали) •Поврежден жгут электропроводки или разъемы •Неисправность ECU вариатора |
| P0746 | Неполадки в работе гидравлической системы управления | ФУНКЦИИ ДИАГНОСТИКИ ECU вариатора определяет наличие неисправности по увеличению передаточного числа (диапазон передаточных чисел: 2,349 – 0,394). | •Отклонение давления в магистрали •Неисправность ECU вариатора |
| P0776 | Неполадки в работе электромагнитного клапана вторичного давления | ECU вариатора выполняет поиск неисправности путем измерения разности между целевым и реальным значениями вторичного давления. | •Неполадки в шине CAN •Отклонение давления в магистрали •Неисправность ECU вариатора |
| P0778 | Неисправность электромагнитного клапана вторичного давления | ECU вариатора определяет неисправность, выявляя отклонения в работе электромагнитного клапана регулировки вторичного давления. | •Неисправность блока клапанов в сборе (вышел из строя электромагнитный клапан регулировки вторичного давления) •Поврежден жгут электропроводки или разъемы •Неисправность ECU вариатора |
| P0815 | Неисправность лопаточного переключателя повышения передач | ECU вариатора определяет, что лопаточный переключатель повышения передачи заблокирован в положении ON (ВКЛ). | •Неисправность лопаточного переключателя передач •Поврежден жгут электропроводки или разъемы •Неисправность ECU вариатора |
| P0816 | Неисправность лопаточного переключателя понижения передач | ECU вариатора определяет, что лопаточный переключатель понижения передачи заблокирован в положении ON (ВКЛ). | •Неисправность лопаточного переключателя передач •Поврежден жгут электропроводки или разъемы •Неисправность ECU вариатора |
| P0826 | Неисправность узла переключателя передач | ECU вариатора определяет переключение UP/DOWN (повышение/понижение) переключателя передач в сборе. ECU вариатора определяет наличие неисправности при вводе отклоняющегося от нормы значения. | •Неисправность селектора диапазонов в сборе (вышел из строя переключатель передач в сборе) •Поврежден жгут электропроводки или разъемы •Неисправность ECU вариатора |
| P0840 | Неисправность датчика вторичного давления | ECU выявляет неисправности путем контроля выходного напряжения датчика вторичного давления. | •Неисправность блока клапанов в сборе (вышел из строя датчик вторичного давления) •Поврежден жгут электропроводки или разъемы •Неисправность ECU вариатора |
| P0841 | Неполадки в работе датчика давления в магистрали | ECU вариатора выполняет поиск неисправности, сравнивая показания датчиков вторичного и первичного давления. | •Отклонение давления в магистрали •Отклонения в системе датчика первичного давления •Отклонения в системе датчика вторичного давления •Неисправность ECU вариатора |
| P0845 | Неисправность датчика первичного давления | ECU вариатора определяет наличие неисправности, если выходное напряжение на датчике первичного давления слишком высокое или слишком низкое. | •Неисправность блока клапанов в сборе (вышел из строя датчик первичного давления) •Поврежден жгут электропроводки или разъемы •Неисправность ECU вариатора |
| P0868 | Падение вторичного давления | ECU вариатора во время движения определяет падение вторичного давления. | •Поврежден жгут электропроводки или разъемы •Неисправность вариатора в сборе •Неисправность ECU вариатора |
| P1637 | Неисправность резервного ЗУ | ECU вариатора проверяет соответствие данных в EEPROM и в резервном ЗУ. | •Поврежден жгут электропроводки или разъемы •Неисправность ECU вариатора (вышел из строя блок EEPROM) |
| P1706 | Сбои сигнала положения дроссельной заслонки | ECU вариатора определяет наличие отклонения в сигнале положения дроссельной заслонки, передаваемом ECU двигателя. | •Неисправная работа шины CAN •Неисправность системы двигателя •Неисправность ECU вариатора |
| P1710 | Сбои сигнала скорости движения | ECU вариатора определяет неисправность по быстрому изменению расчетного сигнала скорости движения, получаемого от ECU ASC. | •Неисправная работа шины CAN •Неисправность ECU вариатора |
| P1723 | Неполадки в работе системы датчиков скорости | ECU вариатора обнаруживает отклонение эпюры сигнала датчика скорости. | •Неисправность датчика частоты вращения ведущего шкива •Неисправность датчика частоты вращения ведомого шкива •Неисправность ECU вариатора |
| P1740 | Неисправность электромагнитного клапана блокировки/селективного переключения | ECU вариатора определяет отклонения в работе электромагнитного клапана блокировки/селективного переключения. | •Неисправность блока клапанов в сборе (вышел из строя электромагнитный клапан блокировки/селективного переключения) •Поврежден жгут электропроводки или разъемы •Неисправность ECU вариатора |
| P1745 | Контроль процентного изменения передаточного числа | ECU вариатора обнаруживает неисправность путем контроля внутреннего расчетного значения. | •Неисправность блока клапанов в сборе (вышел из строя шаговый электродвигатель) •Поврежден жгут электропроводки или разъемы •Неисправность ECU вариатора |
| P1777 | Неисправность шагового электродвигателя | ECU вариатора определяет неисправность, контролируя напряжение каждой катушки шаговых электродвигателей. | •Неисправность ECU вариатора |
| P1778 | Неисправность шагового электродвигателя | ECU вариатора выполняет поиск неисправности шагового электродвигателя, сравнивая целевое и реальное значения частоты вращения ведущего шкива. (Целевое значение: Реальное значение частоты вращения шкива, умноженное на передаточное число, которое соответствует положению шагового электродвигателя) (Реальное измеренное значение: Реальная частота вращения ведущего шкива) | •Неисправность ECU вариатора •Неисправность блока клапанов в сборе (вышел из строя шаговый электродвигатель) |
| P1902 | Неисправность системы двигателя | •Когда ECU двигателя обнаруживает неисправность системы ETV, ECU двигателя переключается в аварийный режим управления (угол поворота дроссельной заслонки: примерно 20 %). •ECU вариатора начинает управлять следующими функциями: отключение блокировки, увеличение вторичного давления, фиксация передаточного числа. | •Неисправность системы двигателя (ETV) |
| U0001 | Неисправность коммуникационной цепи CAN | ECU вариатора выполняет поиск с отключенной шиной | •Неисправная работа шины CAN |
| U0100 | Истекло время ожидания ответа от CAN (двигатель) | ECU вариатора периодически получает данные от ECU двигателя по шине CAN. | •Неисправная работа шины CAN •Неисправность ECU двигателя •Неисправность ECU вариатора |
| U0121 | Истекло время ожидания ответа от CAN (ASC) | ECU вариатора определяет наличие неисправности в случае отклонений в периодической передаче данных от ECU ASC по шине CAN. | •Неисправная работа шины CAN •Неисправность ECU ASC •Неисправность ECU вариатора |
| U0141 | Истекло время ожидания ответа от CAN (ETACS) | ECU вариатора определяет наличие неисправности в случае отклонений в периодической передаче данных от ECU ETACS по шине CAN. | •Неисправная работа шины CAN •Неисправность ETACS-ECU •Неисправность ECU вариатора |




